 咨询电话:0535-6778072 咨询电话:0535-6778072
咨询电话:0535-6778072 咨询电话:0535-6778072 




图像及识别算法研发

EPS 电动助力转向系统
标定目的
为EPS系统提供真实有效的数据,保证传感器真实反映汽车方向盘的物理特性。
电动助力转向系统(Electric Power Steering,缩写EPS)是一种直接依靠电机提供辅助扭矩的动力转向系统,与传统的液压助力转向系统HPS(Hydraulic Power Steering)相比,EPS系统具有很多优点。EPS主要由扭矩传感器、电动机、减速机构和电子控制单元(ECU)等部分组成。
根据助力电机的安装位置不同,EPS系统又可以分为转向轴助力式、齿轮助力式、齿条助力式3种。转向轴助力式EPS的电动机固定在转向轴一侧,通过减速机构与转向轴相连,直接驱动转向轴助力转向。齿轮助力式EPS的电动机和减速机构与小齿轮相连,直接驱动齿轮助力转向。齿条助力式EPS的电动机和减速机构则直接驱动齿条提供助力。
ESP 车身电子稳定系统
标定目的
为ESP系统提供真实有效的数据,保证传感器真实反映汽车的物理特性。
ESP系统由控制单元及转向传感器(监测方向盘的转向角度)、车轮传感器(监测各个车轮的速度转动)、侧滑传感器(监测车体绕垂直轴线转动的状态)、横向加速度传感器(监测汽车转弯时的离心力)等组成。控制单元通过这些传感器的信号对车辆的运行状态进行判断,进而发出控制指令。有ESP与只有ABS及ASR的汽车,它们之间的差别在于ABS及ASR只能被动地作出反应,而ESP则能够探测和分析车况并纠正驾驶的错误,防患于未然。ESP对过度转向或不足转向特别敏感,例如汽车在路滑时左拐过度转向(转弯太急)时会产生向右侧甩尾,传感器感觉到滑动就会迅速制动右前轮使其恢复附着力,产生一种相反的转矩而使汽车保持在原来的车道上。
360度全景影像标定设备
全景环视影像系统摄取车辆四周景物并通过控制器将四周景物合成一幅360°的全景图,显示效果类似从车辆上空俯拍的影像。全景影像拼接的精确程度将直接影响用户的体验。摄像头和车辆在加工和组装过程中,都可能与设计值产生偏差,这些偏差会导致全景影像的效果。全景环视影像系统的整车下线标定就是为了根据实际车辆进行标定以保证全景影像的效果。标定系统由标定主控系统,车辆摆正器,标定板,工艺照明设备组成。

车道偏离预警标定
车道偏离预警系统是一种通过报警的方式辅助驾驶员减少汽车因车道偏离而发生交通事故的系统。车道偏离预警系统由图像处理芯片、控制器、传感器等组成。
标定目的
为车道偏离预警系统提供真实有效的数据,保证传感器真实反映汽车周边环境的物理特性。

电子手刹功能
电子手刹是由电子控制方式实现停车制动的技术。其工作原理与机械式手刹相同,均是通过刹车盘与刹车片产生的摩擦力来达到控制停车制动,只不过控制方式从之前的机械式手刹拉杆变成了电子按钮。
电子手刹也就是电子驻车制动系统。电子驻车制动系统(Electrical Park Brake,EPB)是指将行车过程中的临时性制动和停车后的长时性制动功能整合在一起,并且由电子控制方式实现停车制动的技术。
电子手刹从基本的驻车功能延伸到自动驻车功能AUTO HOLD。AUTO HOLD自动驻车功能技术的运用,使得驾驶者在车辆停下时不需要长时间刹车。启动自动电子驻车制动的情况下,能够避免车辆不必要的滑行。
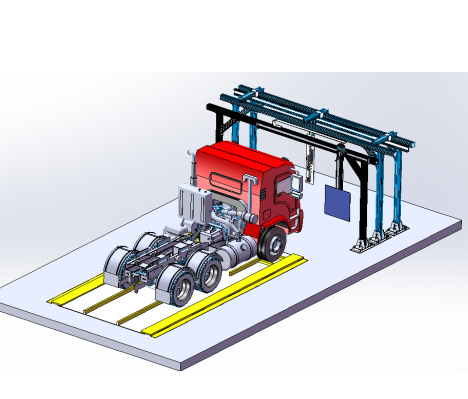
自适应巡航检测
ACC检测系统采用被动式标定,大灯仪灯箱移动到摆正器前方指定位置区域,通过将发射出的光线和接收到光线的对比,来反馈雷达现在安装角度和预设角度的偏差,在通过按照显示器指示调整雷达安装拧紧螺栓进行调节到理论内设范围。具体的位置需要根据三款车型的雷达中心高度及雷达距前轴距离综合考虑。

车道保持系统
车道保持辅助系统属于智能驾驶辅助系统中的一种。它可以在车道偏离预警系统(LDWS)的基础上对刹车的控制协调装置进行控制。
对车辆行驶时借助一个摄像头识别行驶车道的标识线将车辆保持在车道上提供支持。
如果车辆接近识别到的标记线并可能脱离行驶车道,那么会通过方向盘的振动,或者是声音来提请驾驶员注意。
如果车道保持辅助系统识别到本车道两侧的标记线,那么系统处于待命状态。这通过组合仪表盘中的绿色指示灯显示。
当系统处于待命状态下,如果在跃过标记线前打了转向灯,警告信号就会被屏蔽,认定驾驶员为有意识的换道。
 当前位置:
当前位置:
 咨询电话:
咨询电话: 联系地址:山东省烟台市莱山区昊晟路A2号
联系地址:山东省烟台市莱山区昊晟路A2号